| Название окна | Описание |
| Ref. Image/Point | Здесь вы указываете оптимизатору, от какого снимка он будет плясать.
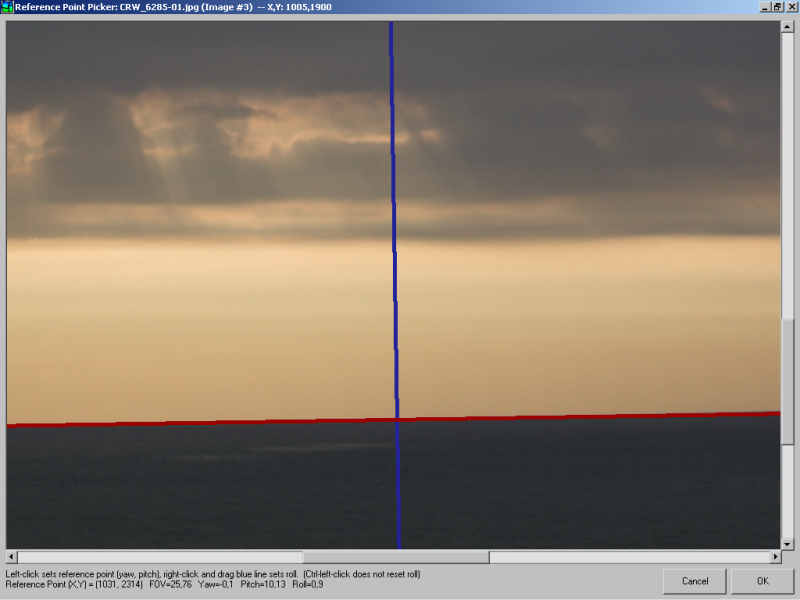
То есть, все сдвиги, повороты искривления будут производится относительно этого снимка. Сам снимок сдвигам, поворотам подвергаться не будет. Также здесь, вы можете выбрать точку, которая будет центром будущей панорамы, относительно нее будут производится искривления, как самой Reference Image, то есть снимка, который вы выбрали как базовый, так и всех остальных, в частности здесь вы зададите линию горизонта, линия которая проходит сквозь виртуальный оптический центр панорамы...
Если на примере, то линия горизонта, на фотографии проходящая сквозь оптический центр фотографии - прямая линия. Смещенная вниз, она вогнута вниз, смещенная вверх - она выпукла вверх. Тоже самое и здесь, постарайтесь подобрать высоту точки, при которой ваша панорама будет смотреться наиболее привлектельно.
Поэкспериментируйте. |
| Use Control Points From: | Здесь вы указываете, какие точки соотвествия будут использованы при оптимизации. Нужно это в тех случаях, чтобы убрать из вычислений кадр, который имеет наибольшее количество точек с наибольшими расстояниями промаха. Удаление этого снимка из расчетов, может облегчить задачу вычисления настоящих параметров дисторсий объектива, используемого при съемке остальных кадров, если конечно, все кадры сняты одним и тем-же объективом. |
Lens Parameters:
(All Images) | Это параметры описывающие дисторию объектива, которым делалась съемка всех кадров (All Images). Если объективы были разные, то на 2м шаге надо было снять галочку "link <Параметр>". |
| Yaw, Pitch, Roll | Смещения, повороты поизводимые над изображениями. Заметьте, что Reference Image, которую вы выбрали ранее, неотмечена галочками, то есть в процессе оптимизации она участвует только как пассивный участник, предоставляющий другим только свои точки сопоставления и подвергаемая преобразованиям, связанным только с компенсацией дисторсий. |
 |
Постараемся добиться хотя бы прямоты горизонта, настраивая таким образом горизонт (красная линия) мы сообщаям оптимизатору, что
изображение должно быть повернуто на -0.9 градуса, чтобы красная линия стала линией горизонта.
Теперь перепрыгнем на шаг №5, нажмем на кнопку "Auto Size Parameters" после этого, нажав на кнопку "Preview" посмотрим, что получилось... Если результат вас удовлетворяет, нажмите, на кнопку "Create" будет расчитана полноформатная панорама, посмотрите на нее внимательно, наверняка, вы увидите огрехи, которые, я надеюсь вам захочется исправить.
О значении, использованных в этой ветве моих рассуждений кнопок, я расскажу чуть позже.
|